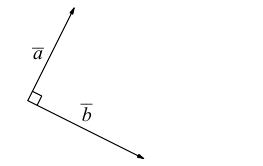
Декартов ортонормированный базис
В приложениях наиболее часто используется
так называемый декартов ортонормированный
базис. В пространстве — это тройка
единичных (или нормированных) взаимно
перпендикулярных (ортогональных)
векторов, обычно обозначаемых
![]() ,
,
а в плоскости — аналогичная пара векторов
![]() .
.
Система координат, определяемая
декартовым ортонормированным базисом,
называется декартовой прямоугольной.
Координаты вектора, разложенного по
декартовому ортонормированному базису,
представляют собой проекции этого
вектора на соответствующие координатные
оси и соответствующим образом обозначаются.
Так, если для пространственного вектора
![]()
имеем следующее разложение по
![]() :
:
![]() ,
,
( 8 )
то
![]() .
.
Используя формулу (1) для нахождения
проекции вектора на ось, имеем
![]() ,
,
( 9 )
где
![]()
— углы, образованные вектором
![]()
соответственно с осями
![]()
![]() .
.
В частности,
![]() ,
,
а поэтому
![]() .
.
Аналогично
![]() .
.
Из формул (9) следует, что если вектор
образует с какой-либо осью острый (тупой)
угол, то соответствующая координата
вектора положительна (соответственно
отрицательна).
Например, вектор
![]()
образует с осью
![]()
тупой угол, а с осями
![]()
— острые углы.
Длина (модуль) вектора, заданного в
декартовом ортонормированном базисе,
равна квадратному корню из суммы
квадратов его координат. Именно,
![]()
( 10 )
для вектора (8), заданного в базисе
![]() ,
,
и
![]()
для вектора, заданного в базисе
![]() .
.
Косинусы углов
![]() ,
,
образованных вектором (8) с координатными
осями, называются направляющими. На
основании формулы (9) они равны
![]() .
.
( 11 )
Из формул (11) и (10) следует, что сумма
квадратов направляющих косинусов равна
единице,
![]() ,
,
( 12 )
а поэтому орт вектора (8) определяется
следующей формулой:
![]() .
.
( 13 )
В свою очередь вектор может быть
представлен с помощью своих длины и
орта, а именно:
![]()
( 14 )
Пример. Найти расстояние между точками
![]() .
.
Достаточно найти длину вектора
![]() :
:
![]() .
.
(15)
Пример. Вектор![]()
задан в декартовом ортонормированном
базисе
![]()
своим началом
![]()
и концом
![]() .
.
Найти вектор, его длину, орт, направляющие
косинусы, расстояние между точками A
и B.
Затем найти вектор
![]() ,
,
имеющий длину 12 и направленный
противоположно вектору
![]() ,
,
а также вектор
![]()
длины 20, сонаправленный с вектором
![]() .
.
По формуле (5)
![]()
Пользуясь теперь формулами (10), (15), (11),
(13), (14), последовательно получаем
![]()
![]()
![]()
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
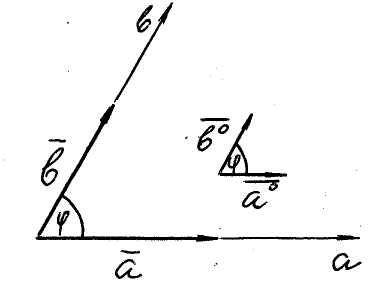
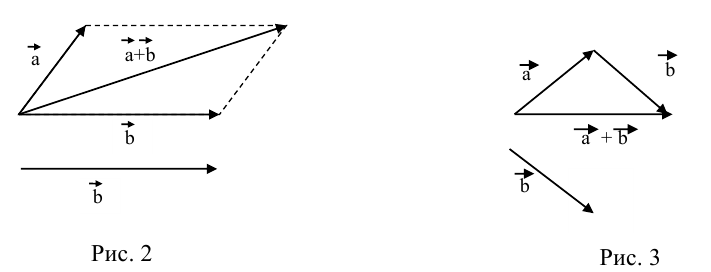
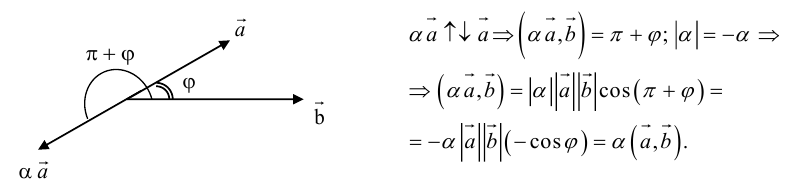
Скалярное произведение двух векторов
 Как
Как
известно, скалярным произведением
двух векторов называется чи-сло, равное
произведению длин (модулей) этих векторов
на косинус угла между ними, то есть (см.
рис. 3)
![]() .
.
( 16 )
Пример. Скалярное произведение векторов
![]() ,
,
Рис. 3 имеющих длины
![]()
и образующих угол
![]() ,
,
равно
![]()
Скалярное произведение равно произведению
длины одного вектора на проекцию другого
на первый (или, точнее, на ось, определяемую
первым вектором),
![]() ,
,
( 17 )
где a, b
– оси, определенные векторами
![]() соответственно.
соответственно.
Формула (17) следует из определения (16) и
формулы (1) для нахождения проекции
вектора на ось.
Пример. Проекции каждого из векторов
предыдущего примера на ось другого на
основании формулы (17) соответственно
равны
![]() .
.
Необходимо хорошо знать свойства
скалярного произведения: 1) перестановочность
(![]() ),
),
2) сочетательность относительно скалярного
(в том числе числового) множителя (![]() ),
),
3) распределительность относительно
векторных сомножителей (![]() ).
).
Особо отметим два следующих свойства:
4)
![]() ,
,
( 18 )
то есть скалярный квадрат вектора равен
квадрату его длины;
5) Два ненулевых вектора перпендикулярны
(ортогональны) тогда и только тогда,
если их скалярное произведение равно
нулю.
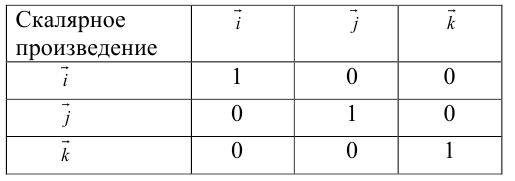
Пример. Скалярные произведения векторов
декартового ортонормированного базиса
![]() равны
равны
нулю,
![]() ,
,
так как
![]() .
.
Пример. Длины векторов
![]()
равны
![]() ,
,
угол между ними
![]() .
.
Найти длину вектора
![]() .
.
На основании свойств скалярного
произведения, в том числе формулы (18),

Если векторы заданы в декартовом
ортонормированном базисе
![]() ,
,
то их скалярное произведение равно
сумме произведений их соответствующих
координат, то есть если
![]() ,
,
или просто
![]() ,
,
то
![]() .
.
( 19 )
 Пример.
Пример.
Является ли прямоугольным треугольник
с данными вершинами
![]()
![]() ?
?
Найти его внутренний и внешний углы при
вершине A (рис. 4).
Стороны треугольника ABC
равны
![]()
![]() ,
,
Рис. 4 причем
![]() .
.
Поэтому треугольник не является
прямоугольным. Для нахождения упомянутых
углов введем векторы
![]() .
.
Используя формулы (16) и (19), мы получаем
![]()
![]()
![]()
Пример. Найти вектор
![]() ,
,
удовлетворяющий условиям
![]() ,
,
где
![]()
— данные векторы.
Пусть искомый вектор имеет координаты
![]() ,
,
то есть
![]() .
.
Тогда
![]()
и решение задачи сводится к
решению системы линейных уравнений
относительно
![]() ,
,

Эта последняя была решена в первой части
настоящего пособия, а именно:
![]() .
.
Ответ: Искомый вектор
![]() .
.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
13.07.2019109.06 Кб1ll.doc
Определение ортонормированного базиса и прямоугольной декартовой системы координат (ПДСК).
Определение. Базис называется ортонормированным, если его векторы попарно ортогональны и равны единице.
Определение. Декартова система координат, базис которой ортонормирован называется декартовой прямоугольной системой координат.
Вывод формул для вычисления длины вектора, заданного своими координатами в ортонормированном базисе, расстояния между двумя точками.
Нахождение длины вектора по координатам.
Длину вектора  будем обозначать
будем обозначать  . Аналогичное обозначение имеет модуль числа, и длину вектора часто называют модулем вектора.
. Аналогичное обозначение имеет модуль числа, и длину вектора часто называют модулем вектора.
Начнем с нахождения длины вектора на плоскости по координатам.
Введем на плоскости прямоугольную декартову систему координат Oxy. Пусть в ней задан вектор и он имеет координаты  . Получим формулу, позволяющую находить длину вектора через координаты
. Получим формулу, позволяющую находить длину вектора через координаты  и
и  .
.
Отложим от начала координат (от точки О) вектор  . Обозначим проекции точки А на координатные оси как
. Обозначим проекции точки А на координатные оси как  и
и  соответственно и рассмотрим прямоугольник
соответственно и рассмотрим прямоугольник  с диагональю ОА.
с диагональю ОА.

В силу теоремы Пифагора справедливо равенство  , откуда
, откуда  . Из определения координат вектора в прямоугольной системе координатмы можем утверждать, что
. Из определения координат вектора в прямоугольной системе координатмы можем утверждать, что  и
и  , а по построению длина ОА равна длине вектора
, а по построению длина ОА равна длине вектора  , следовательно,
, следовательно,  .
.
Таким образом, формула для нахождения длины вектора  по его координатам на плоскости имеет вид
по его координатам на плоскости имеет вид  .
.
Если вектор представлен в виде разложения по координатным векторам  , то его длина вычисляется по этой же формуле , так как в этом случае коэффициенты и являются координатами вектора в заданной системе координат.
, то его длина вычисляется по этой же формуле , так как в этом случае коэффициенты и являются координатами вектора в заданной системе координат.
Рассмотрим пример.
Найдите длину вектора  , заданного в декартовой системе координат.
, заданного в декартовой системе координат.
Сразу применяем формулу для нахождения длины вектора по координатам :

 .
.
Теперь получим формулу для нахождения длины вектора  по его координатам в прямоугольной системе координат Oxyz в пространстве.
по его координатам в прямоугольной системе координат Oxyz в пространстве.
Отложим от начала координат вектор и обозначим проекции точки А на координатные оси как  и
и  . Тогда мы можем построить на сторонах
. Тогда мы можем построить на сторонах  и
и  прямоугольный параллелепипед, в котором ОА будет диагональю.
прямоугольный параллелепипед, в котором ОА будет диагональю.

В этом случае  (так как ОА – диагональ прямоугольного параллелепипеда), откуда
(так как ОА – диагональ прямоугольного параллелепипеда), откуда  . Определение координат вектора позволяет нам записать равенства
. Определение координат вектора позволяет нам записать равенства  , а длина ОА равна искомой длине вектора, следовательно,
, а длина ОА равна искомой длине вектора, следовательно,  .
.
Таким образом, длина вектора в пространстве равна корню квадратному из суммы квадратов его координат, то есть, находится по формуле  .
.
Вычислите длину вектора  , где
, где  — орты прямоугольной системы координат.
— орты прямоугольной системы координат.
 .
.
Длина вектора через координаты точек его начала и конца.
А как найти длину вектора, если даны координаты точек его начала и конца?
В предыдущем пункте мы получили формулы для нахождения длины вектора по его координатам на плоскости и в трехмерном пространстве. Тогда мы можем ими воспользоваться, если найдем координаты вектора по координатам точек его начала и конца.
Таким образом, если на плоскости заданы точки  и
и  , то вектор
, то вектор  имеет координаты
имеет координаты  и его длина вычисляется по формуле
и его длина вычисляется по формуле  , а формула для нахождения длины вектора по координатам точек
, а формула для нахождения длины вектора по координатам точек  и
и  трехмерного пространства имеет вид
трехмерного пространства имеет вид  .
.
Рассмотрим решения примеров.
Найдите длину вектора , если в прямоугольной декартовой системе координат  .
.
Можно сразу применить формулу для нахождения длины вектора по координатам точек начала и конца на плоскости :

Вторым вариантом решения является определение координат вектора через координаты точек и применение формулы :

 .
.
при  .
.
Нахождение длины вектора по теореме косинусов.
Большинство задач на нахождение длины вектора решаются в координатах. Однако, когда координаты вектора не известны приходится искать другие пути решения.
Пусть известны длины двух векторов ,  и угол между ними (или косинус угла), а требуется найти длину вектора
и угол между ними (или косинус угла), а требуется найти длину вектора  или
или  . В этом случае можно по теореме косинусов в треугольнике АВС вычислить длину стороны ВС, которая равна искомой длине вектора.
. В этом случае можно по теореме косинусов в треугольнике АВС вычислить длину стороны ВС, которая равна искомой длине вектора.
Разберем решение примера для пояснения сказанного.
Длина вектора равна длине стороны ВС в треугольнике АВС. Из условия нам известны длины сторон АВ и АС этого треугольника (они равны длинам соответствующих векторов), а также угол между ними, поэтому нам достаточно данных для применения теоремы косинусов:

Таким образом,  .
.
.
Итак, для нахождения длины вектора по координатам используем формулы
или ,
по координатам точек начала и конца вектора —
или ,
в некоторых случаях к результату приводит теорема косинусов.
|
Расстояние между двумя точкамиA1(x1;y1) и A2(x2;y2) в прямоугольной системе координат выражается формулой: Порядок точек не играет роли. Расстояние считается положительным. поэтому корень берется с одним знаком (плюс). |
 Расстояние между двумя точками Расстояние между двумя точками
|
Содержание:
Векторная алгебра
Векторная алгебра — это раздел векторного исчисления, изучающий линейные операции с векторами и их геометрические свойства; часть линейной алгебры, занимающаяся векторными пространствами; различные векторные алгебры XIX века (например, кватернионов, бикватернионов, сплит-кватернионов).
Векторы и линейные операции над ними
Займемся теперь таким важным как в самой математике, так и в ее многочисленных приложениях, понятием вектора.
Определение: Вектором, на плоскости или в пространстве называется отрезок прямой с заданным на нем направлением, т. е. одна из его граничных точек считается начальной, а вторая — конечной.
Обозначать векторы мы будем строчными латинскими буквами 
Длина отрезка, изображающего вектор называется его длиной и обозначается через
называется его длиной и обозначается через  Вектор с совпадающими начальной и конечной точками называется нуль-вектором. Для него используется обозначение
Вектор с совпадающими начальной и конечной точками называется нуль-вектором. Для него используется обозначение 
По определению, два вектора считаются равными, если один из них можно преобразовать в другой с помощью параллельного переноса.
Учитывая приведенное определение, всюду в дальнейшем мы без специальных оговорок будем перемещать вектор параллельным переносом в любую удобную для нас точку.
Два вектора  называются коллинеарными (обозначение
называются коллинеарными (обозначение  ), если отрезки их изображающие параллельны.
), если отрезки их изображающие параллельны.
Аналогично, векторы а и b называются ортогональными (обозначение  ), если соответствующие отрезки перпендикулярны.
), если соответствующие отрезки перпендикулярны.
Три вектора называются компланарными, если после приведения их общему началу, они будут расположены в одной плоскости.
Углом между векторами  приведенными к общему началу, называется меньший из двух углов между соответствующими отрезками. Обозначать угол мы будем строчными греческими буквами
приведенными к общему началу, называется меньший из двух углов между соответствующими отрезками. Обозначать угол мы будем строчными греческими буквами 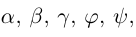 … или через
… или через 
Два ненулевых вектора  мы будем считать одинаково направленными, если
мы будем считать одинаково направленными, если  и противоположно направленными, если
и противоположно направленными, если 
Введем теперь линейные операции над векторами.
а) Умножение числа на вектор.
Произведением действительного числа  на вектор
на вектор называется вектор
называется вектор  длина которого равна
длина которого равна  а направление его совпадает с направлением вектора
а направление его совпадает с направлением вектора  если
если  и имеет противоположное с ним направление, если
и имеет противоположное с ним направление, если  Если
Если  или
или 
В частности, вектор обозначается через
обозначается через  и называется вектором, противоположным вектору
и называется вектором, противоположным вектору 
Если  то произведение
то произведение  мы будем иногда записывать в виде
мы будем иногда записывать в виде 
Из приведенного определения сразу же следует, что коллинеарные векторы  линейно связаны, т. е. существует константа
линейно связаны, т. е. существует константа  такая,что
такая,что  В качестве такой константы следует
В качестве такой константы следует
взять число  Если
Если  то
то  В частности, если
В частности, если  то вектором единичной длины с направлением данного вектора является вектор
то вектором единичной длины с направлением данного вектора является вектор 
b) Сложение векторов.
Суммой двух векторов  называется вектор
называется вектор  который находится по правилу треугольника
который находится по правилу треугольника
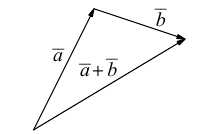
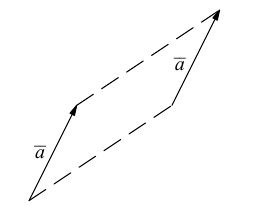
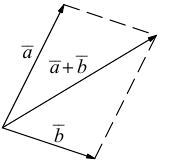
или по равносильному ему правилу параллелограмма
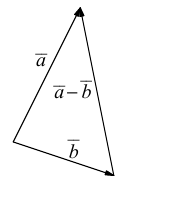
Вектор 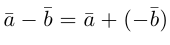 называется разностью векторов
называется разностью векторов 
Свойства линейных операций над векторами аналогичны соответствующим свойствам действительных чисел.
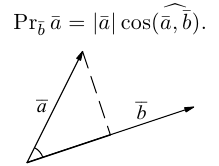
Проекцией вектора  на вектор
на вектор  называется число
называется число
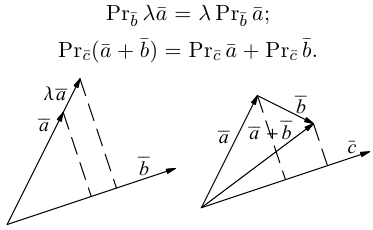
Геометрически очевидны следующие свойства проекции:
Пример №1
Пусть Е и F — середины сторон AD и ВС соответственно выпуклого четырехугольника ABCD. Доказать, что
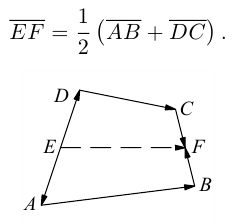
Доказательство. Из четырехугольников EDCF и EABF по правил}’ сложения векторов получим:
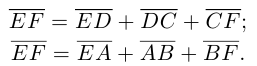
Сложив данные равенства и учитывая, что  будем иметь:
будем иметь:

что и требовалось.
Базис и декартова система координат
Определение: Базисом на плоскости называется упорядоченная пара неколлинеарных векторов. Базисом в пространстве называется упорядоченная тройка некомпланарных векторов.
Обозначение:  — базис на плоскости,
— базис на плоскости,  — базис в пространстве. Всюду в дальнейшем, не оговаривая это особо, будем рассматривать только положительно ориентированные базисы, т. е. базисы, у которых кратчайший поворот от вектора
— базис в пространстве. Всюду в дальнейшем, не оговаривая это особо, будем рассматривать только положительно ориентированные базисы, т. е. базисы, у которых кратчайший поворот от вектора  к вектору
к вектору  совершается против часовой стрелки, если наблюдение ведется со стороны вектора
совершается против часовой стрелки, если наблюдение ведется со стороны вектора Сформулируем теперь фундаментальное свойство базиса.
Сформулируем теперь фундаментальное свойство базиса.
Теорема. Любой вектор единственным образом разлагается по базису, т. е. представляется в виде  где действительные числа
где действительные числа  — координаты вектора
— координаты вектора  в базисе
в базисе
Приведем геометрическое доказательство этого утверждения.
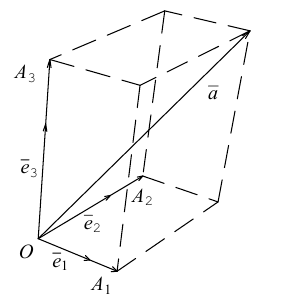
Вектор можно единственным образом представить как большую диагональ параллелепипеда, ребра которого, параллельны базисным векторам. Тогда по правилу сложения векторов
можно единственным образом представить как большую диагональ параллелепипеда, ребра которого, параллельны базисным векторам. Тогда по правилу сложения векторов  В виду коллинеарности векторов
В виду коллинеарности векторов  соответствующим базисным векторам, мы можем записать, что
соответствующим базисным векторам, мы можем записать, что  — некоторые действительные числа. Отсюда и следует искомое разложение.
— некоторые действительные числа. Отсюда и следует искомое разложение.
Если базис зафиксирован, то факт, что вектор а в этом базисе имеет координаты  коротко записывается как
коротко записывается как 
Из доказанной теоремы следует, что при выполнении линейных операций над векторами точно также преобразуются и их координаты, т. е. если  если
если  Отсюда, в частности, следует, что два вектора коллинеарны тогда и только тогда, когда их координаты пропорциональны, т. е.
Отсюда, в частности, следует, что два вектора коллинеарны тогда и только тогда, когда их координаты пропорциональны, т. е.
Рассмотрим теперь ортонормированный базис  т.е. базис, в котором все векторы имеют единичную длин}’ и попарно ортогональны. Векторы этого базиса мы будем называть ортами. Пусть в этом базисе
т.е. базис, в котором все векторы имеют единичную длин}’ и попарно ортогональны. Векторы этого базиса мы будем называть ортами. Пусть в этом базисе 
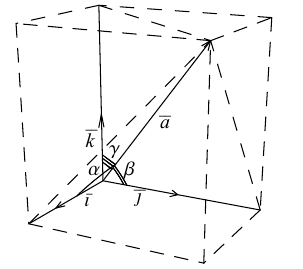
Как видно из чертежа, координаты вектора в ортонормированном базисе представляют собой проекции этого вектора на соответствующие орты. т. е.

Величины  т. е. косинусы углов, которые образует данный вектор с ортами
т. е. косинусы углов, которые образует данный вектор с ортами  к соответственно, называются направляющими косинусами вектора
к соответственно, называются направляющими косинусами вектора  Единичный вектор
Единичный вектор  имеет координаты
имеет координаты 
Очевидно также, что
Свяжем теперь с ортонормированным базисом декартову (прямоугольную) систему координат. Для этого поместим начала ортов в некоторую точку О, ось Ох (абсцисс) направим вдоль орта  ось
ось  (ординат) — вдоль орта
(ординат) — вдоль орта  наконец, ось
наконец, ось  (аппликат) направим вдоль орта
(аппликат) направим вдоль орта

В выбранной системе координат координаты радиуса-вектора  мы будем называть координатами точки М и записывать
мы будем называть координатами точки М и записывать 
Если известны координаты начальной  и конечной
и конечной  точек вектора, то из равенства
точек вектора, то из равенства  слезет, что его координаты равны
слезет, что его координаты равны
 и, значит, расстояние между точками
и, значит, расстояние между точками  вычисляется по формуле
вычисляется по формуле

Найдем теперь координаты точки М, делящей отрезок с концами в точках  в данном
в данном
отношении  Так как
Так как  Отсюда, переходя к координатам получим:
Отсюда, переходя к координатам получим:

Следовательно, координаты искомой точки вычисляются по формулам:

Найдем, в частности, координаты середины отрезка. Здесь А = 1, поэтому

Пример №2
Треугольник задан координатами своих вершин 
 Найти координаты точки пересечения его медиан. Решение.
Найти координаты точки пересечения его медиан. Решение.
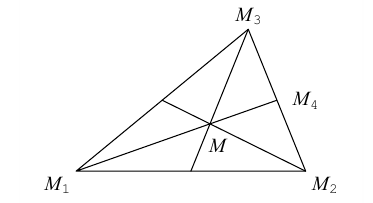
Пусть — середина отрезка
— середина отрезка  — точка пересечения медиан. Тогда
— точка пересечения медиан. Тогда

По известному свойству точки пересечения медиан  и потому
и потому

Подставив сюда найденные координаты точки  ползучим:
ползучим:

Таким образом, координаты точки пересечения медиан треугольника равны средним арифметическим соответствующих координат его вершин.
Замечание. Базисом n-мерного пространства  называется упорядоченная совокупность n векторов
называется упорядоченная совокупность n векторов

обладающая тем свойством, что любой вектор единственным образом представляется в виде линейной комбинации базисных векторов (1), т.е. существуют действительные числа
единственным образом представляется в виде линейной комбинации базисных векторов (1), т.е. существуют действительные числа  (координаты вектора
(координаты вектора в базисе (1)) такие, что
в базисе (1)) такие, что

В качестве базиса в  мы можем взять, например, векторы
мы можем взять, например, векторы

так как, очевидно, любой вектор  однозначно представляется в виде (2).
однозначно представляется в виде (2).
Скалярное произведение векторов
Определение: Скалярным произведением векторов  называется число
называется число

Из этого определения сразу же следует, что

и таким образом, если один из векторов имеет единичную длину, то их скалярное произведение равно проекции второго вектора на единичный.
Отметим основные свойства скалярного произведения.
Первые два и последнее свойства немедленно следуют из определения скалярного произведения, а третье и четвертое — из сформулированных в §1 свойств проекции.
Найдем теперь представление скалярного произведения в координатах. Пусть в орто-нормированном базисе  векторы
векторы  имеют координаты
имеют координаты  Заметив, что по свойствам 1) и 5) скалярного произведения
Заметив, что по свойствам 1) и 5) скалярного произведения

перемножим векторы скалярно, используя свойства 2) — 4):
скалярно, используя свойства 2) — 4):

Таким образом, скалярное произведение в ортонормированном базисе равно сумме произведений соответствующих координат векторов.
Пример №3
Разложить вектор  на две ортогональные составляющие, одна из которых коллинеарна вектору
на две ортогональные составляющие, одна из которых коллинеарна вектору 
Решение.
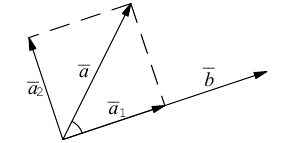
Из чертежа следует, что  — искомое разложение. Найдем векторы
— искомое разложение. Найдем векторы  Составляющая
Составляющая  коллинеарная вектору
коллинеарная вектору  равна, очевидно, вектору проекции
равна, очевидно, вектору проекции  и, следовательно,
и, следовательно,
Тогда вторая ортогональная составляющая вектора  равна
равна

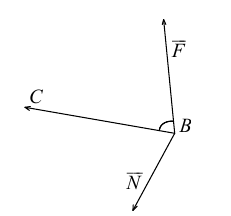
В заключение параграфа рассмотрим одно простое приложение скалярного произведения в механике. Пусть под действием постоянной силы  материальная тотп<а переместилась по прямой из положения В в положение С.
материальная тотп<а переместилась по прямой из положения В в положение С.
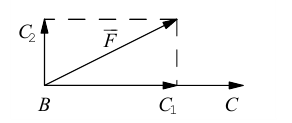
Найдем работу этой силы. Для этого разложим вектор силы на две ортогональные составляющие. одна из которых коллинеарна вектору перемещения  Тогда
Тогда

Составляющая  работы не совершает, следовательно, работа силы
работы не совершает, следовательно, работа силы  равна работе составляющей
равна работе составляющей  и, таким образом,
и, таким образом,

Окончательно, работа силы, под действием которой материальная точка перемещается по отрезку прямой из положения В в положение С, вычисляется по формуле:
Замечание. Скалярным произведением векторов  n-мерного пространства
n-мерного пространства называется число
называется число  равное произведению первого вектора, записанного строкой, на второй вектор, записанный столбцом. Таким образом, если
равное произведению первого вектора, записанного строкой, на второй вектор, записанный столбцом. Таким образом, если
то

Несложной проверкой мы можем убедиться в том, что таким образом определенное скалярное произведение в  обладает свойствами 2) — 4) скалярного произведения векторов на плоскости или в пространстве.
обладает свойствами 2) — 4) скалярного произведения векторов на плоскости или в пространстве.
Длиной вектора  называется число
называется число

Векторы называются ортогональными, если
называются ортогональными, если  Векторы
Векторы

составляют ортонормированный базис пространства , так как каждый из этих векторов имеет единичную длину и все они попарно ортогональны.
Любой вектор  мы можем рассматривать как точку
мы можем рассматривать как точку

n-мерного пространства с координатами 
Взяв еще одну точку  соответствующую вектору
соответствующую вектору  мы под расстоянием между точками М и N будем понимать длину вектора
мы под расстоянием между точками М и N будем понимать длину вектора  т. е. число
т. е. число

Таким образом переопределенное пространство  с расстоянием (2) между точками мы будем называть евклидовым пространством, сохранив для него то же обозначение.
с расстоянием (2) между точками мы будем называть евклидовым пространством, сохранив для него то же обозначение.
Совокупность точки О(0.0,…, 0) и ортонормированного базиса (1) называется декартовой системой координат евклидова пространства R». Точка 0(0,0,… ,0) называется, естественно, началом координат.
Векторное произведение векторов
Определение: Векторным произведением некоялинеарных векторов  называется вектор
называется вектор  такой, что
такой, что


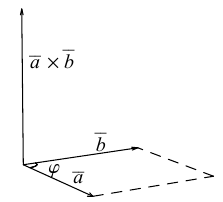
Из этого определения следует, что площадь параллелограмма, построенного на векторах  и
и  равна длине векторного произведения
равна длине векторного произведения  , т. е.
, т. е.
Сформулируем основные свойства векторного произведения.
Первые два свойства очевидным образом следуют из определения векторного произведения. Доказательство третьего ввиду его громоздкости мы приводить не будем.
Найдем формулу для вычисления векторного произведения в координатах. Пусть векторы и в ортонормированном базисе  имеют координаты
имеют координаты  Учитывая, tito по определению векторного произведения
Учитывая, tito по определению векторного произведения

раскроем скобки в векторном произведении  принимая во внимание свойства 1) — 3):
принимая во внимание свойства 1) — 3): 
Полученный вектор мы можем записать в виде следующего символического определителя.
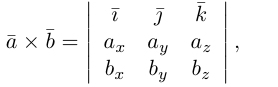
вычислять который удобно разложением по первой строке.
Пример №4
Найти составляющую вектора  , ортогональную плоскости векторов
, ортогональную плоскости векторов  .
.
Решение.
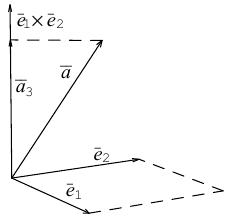
Из чертежа видно, что искомая составляющая представляет собой вектор проекции данного вектора  на векторное произведение
на векторное произведение и, следовательно.
и, следовательно.
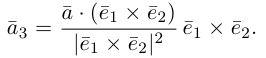
Переходим к вычислениям:

Тогда 
Среди многочисленных приложений векторного произведения отметим его применение в механике при вычислении момента силы.
Итак, пусть сила  приложена к материальной точке В. Моментом этой силы относительно неподвижной точки С называется вектор
приложена к материальной точке В. Моментом этой силы относительно неподвижной точки С называется вектор

Смешанное произведение векторов
Определение: Смешанным произведением трех векторов  называется число
называется число
Выясним геометрический смысл смешанного произведения для тройки некомпланарных векторов.
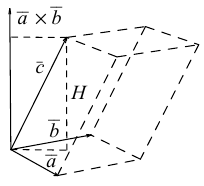
По определению смешанного произведения

Поскольку  — площадь параллелограмма, построенного на векторах
— площадь параллелограмма, построенного на векторах  (§4)
(§4)
 -высота параллелепипеда построенного на векторах
-высота параллелепипеда построенного на векторах  то
то

— объем параллелепипеда. Таким образом, абсолютная величина смешанного произведения трех векторов равна объему параллелепипеда, построенного на этих векторах.
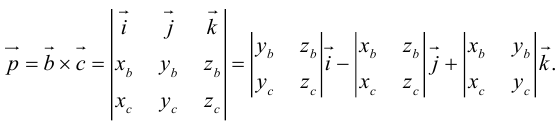
Если векторы заданы своими координатами в ортонормированном базисе  , т.е.
, т.е.  то учитывая формулы для вычисления скалярного и векторного произведений (§3, §4), получим:
то учитывая формулы для вычисления скалярного и векторного произведений (§3, §4), получим:

Следовательно (глава I. §2, пункт 3, свойство 7)), в координатах смешанное произведение вычисляется по формуле:
Докажем, пользуясь этой формулой, некоторые свойства смешанного произведения.

что следует из свойства 4) определителя (глава I. §2, пункт 3). Таким образом, в смешанном произведении можно менять местами знаки скалярного и векторного произведения, и поэтому для него используется более короткое обозначение  . которым мы и будем пользоваться в дальнейшем.
. которым мы и будем пользоваться в дальнейшем.
Эти свойства смешанного произведения также являются прямыми следствиями соответствующих свойств определителя.
Докажем еще одно, геометрическое свойство смешанного произведения.
Теорема. Три вектора  компланарны тогда и только тогда, когда их смешанное произведение равно нулю.
компланарны тогда и только тогда, когда их смешанное произведение равно нулю.
Доказательство. Докажем необходимость условия теоремы. Пусть векторы  компланарны. Очевидно, что, если хотя бы один из них равен нулю, то и их смешанное произведение равно нулю. Если же все они ненулевые, то, ввиду их компланарности, векторное произведение
компланарны. Очевидно, что, если хотя бы один из них равен нулю, то и их смешанное произведение равно нулю. Если же все они ненулевые, то, ввиду их компланарности, векторное произведение  ортогонально вектору с и, следовательно,
ортогонально вектору с и, следовательно,  . Аналогично проверяется достаточность условия теоремы.
. Аналогично проверяется достаточность условия теоремы.
Следствие. Три вектора  образуют базис в том и только в том случае, когда их смешанное произведение отлично от нуля.
образуют базис в том и только в том случае, когда их смешанное произведение отлично от нуля.
Заметим, кроме того, что, если  , то угол между векторами
, то угол между векторами  -острый (тупой) и, следовательно, базис
-острый (тупой) и, следовательно, базис  является положительно (отрицательно) ориентированным.
является положительно (отрицательно) ориентированным.
Пример №5
Доказать, что пять точек

расположены в одной плоскости.
Решение. Рассмотрим векторы  Так как
Так как

то по доказанной выше теореме эти векторы компланарны и, стало быть. точки  находятся в одной плоскости
находятся в одной плоскости  Аналогично покажем, что и точки
Аналогично покажем, что и точки  также принадлежат одной плоскости
также принадлежат одной плоскости  . Действительно,
. Действительно, 
так как первая и третья строки в определителе пропорциональны. Плоскости  имеют три общие точки
имеют три общие точки  , следовательно, они совпадают и, таким образом, все пять точек расположены в одной плоскости.
, следовательно, они совпадают и, таким образом, все пять точек расположены в одной плоскости.
Векторы и линейные операции над ними
Определение: Вектором называется направленный отрезок (рис. 1).
 А – начало, В – конец вектора
А – начало, В – конец вектора 
Рис. 1
Так как вектор определяется его началом и концом, то можно сформулировать эквивалентное данному определение.
Определение: Вектором называется упорядоченная пара точек.
Определение: Длина вектора  – расстояние между его началом и концом.
– расстояние между его началом и концом.
Определение: Два вектора называются равными, если они имеют равные длины и одинаково направлены. При этом одинаково направленными называются векторы, лежащие на параллельных прямых и имеющие одинаковые направления.
Из этого определения следует, что точка приложения вектора значения не имеет, то есть вектор не изменяется, если его перемещать параллельно самому себе, сохраняя длину. Такие векторы называются свободными.
Если начало и конец вектора совпадают, он называется нулевым:
 – нулевой вектор: его направление не определено, а длина
– нулевой вектор: его направление не определено, а длина  .
.
Определение: Векторы  называются коллинеарными, если они лежат на параллельных прямых:
называются коллинеарными, если они лежат на параллельных прямых: 
Так как направление нулевого вектора не определено, то он коллинеарен любому другому.
Определение: Векторы называются компланарными, если они параллельны одной плоскости.
Нулевой вектор компланарен любой системе компланарных векторов.
Линейные операции над векторами
Линейными называются операции сложения векторов и умножения на число.
Сложение
а) Правило параллелограмма (рис.2): начала  совмещаются в одной точке, и
совмещаются в одной точке, и  – диагональ параллелограмма, построенного на .
– диагональ параллелограмма, построенного на .
б) Правило треугольника (рис. 3): начало  совмещается с концом
совмещается с концом 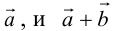 направлен от начала
направлен от начала  к концу
к концу  .
.
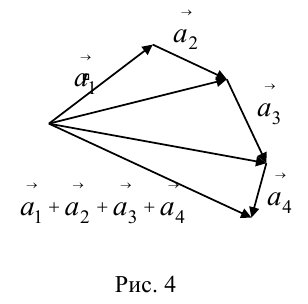
в) Правило сложения нескольких векторов (рис. 4).
Вектор  замыкает ломаную линию, построенную таким образом: конец предыдущего вектора совмещается с началом последующего и
замыкает ломаную линию, построенную таким образом: конец предыдущего вектора совмещается с началом последующего и  направлен от начала
направлен от начала  к концу
к концу .
.
Умножение на число
Определение: Произведением вектора  на число
на число  называется вектор
называется вектор  , aудовлетворяющий условиям:
, aудовлетворяющий условиям:
а) 
б) 
в) , если
, если  ,a если
,a если  , если
, если  .
.
Произведение  называется вектором, противоположным вектору
называется вектором, противоположным вектору . Очевидно,
. Очевидно,  .
.
Определение: Разностью  называется сумма вектора и вектора, противоположного
называется сумма вектора и вектора, противоположного  (рис. 5).
(рис. 5).
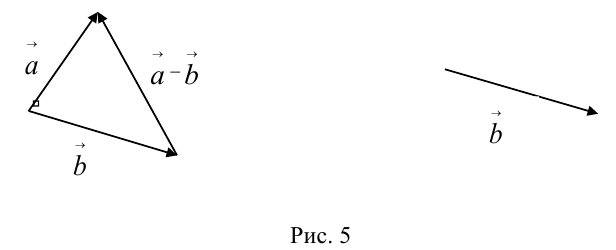
Начала  совмещаются в одной точке, и
совмещаются в одной точке, и  направлен от конца
направлен от конца  к концу
к концу  .
.
Свойства линейных операций
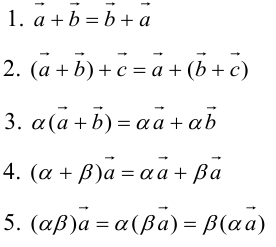
Определение: Результат конечного числа линейных операций над векторами называется их линейной комбинацией: – линейная комбинация векторов
– линейная комбинация векторов  с коэффициентами
с коэффициентами 
Пример №6
Пусть М – точка пересечения медиан треугольника АВС, а О – произвольная точка пространства. Представить  как линейную комбинацию
как линейную комбинацию
 (рис. 6).
(рис. 6).
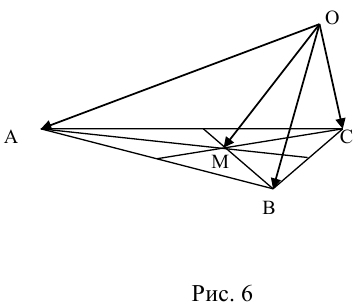
 . Так как точка пересечения медиан треугольника делит их в отношении 2:1, считая от вершины, то из правила параллелограмма следует, что
. Так как точка пересечения медиан треугольника делит их в отношении 2:1, считая от вершины, то из правила параллелограмма следует, что 
По правилу треугольника  , то есть
, то есть  – линейная комбинация
– линейная комбинация  с коэффициентами
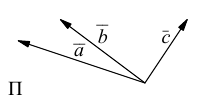
с коэффициентами 
Теорема: Пусть  – неколлинеарные векторы. Тогда любой компланарный с ними вектор c может быть представлен в виде
– неколлинеарные векторы. Тогда любой компланарный с ними вектор c может быть представлен в виде

где коэффициенты (2.1) определяются единственным образом.
Представление вектора  в виде (2.1) называется разложением его по двум неколлинеарным векторам.
в виде (2.1) называется разложением его по двум неколлинеарным векторам.
Доказательство:
- Пусть среди
 есть два коллинеарных, например:
есть два коллинеарных, например: - Пусть среди коллинеарных нет, тогда совместим начала всех трех векторов в одной точке. Построим параллелограмм, диагональ которого совпадает с , а стороны параллельны прямым, на которых лежат (рис. 7).
 есть два коллинеарных, например:
есть два коллинеарных, например: 

 , а стороны параллельны прямым, на которых лежат
, а стороны параллельны прямым, на которых лежат  (рис. 7).
(рис. 7). Тогда c  но
но 
 Поэтому
Поэтому 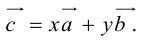
Докажем единственность разложения. Предположим, что  и
и  Тогда, вычитая одно равенство из другого, получим:
Тогда, вычитая одно равенство из другого, получим:
Если  , что противоречит условию. Теорема доказана.
, что противоречит условию. Теорема доказана.
Теорема: Пусть  – некомпланарные векторы. Тогда любой вектор
– некомпланарные векторы. Тогда любой вектор  может быть представлен в виде
может быть представлен в виде

причем единственным образом.
Представление вектора  в виде (2.2) называется разложением его по трем некомпланарным.
в виде (2.2) называется разложением его по трем некомпланарным.
Доказать самостоятельно.
Проекция вектора на ось
Проекция вектора на ось — это скалярная величина (число), равная длине геометрической проекции вектора, если направление оси и геометрической проекции совпадают; или число, противоположное длине геометрической проекции вектора, если направления геометрической проекции и оси — противоположные.
Координаты вектора
Осью называется направленная прямая.
Определение: Ортом оси  называется единичный вектор
называется единичный вектор 
направление которого совпадает с направлением оси.
Определение: Ортогональной проекцией точки М на ось  называется основание
называется основание  перпендикуляра, опущенного из М на
перпендикуляра, опущенного из М на  .
.
Определение: Ортогональной проекцией вектора  на ось
на ось  называется длина отрезка
называется длина отрезка  этой оси, заключенного между ортогональными проекциями его начала и конца, взятая со знаком «+», если направление вектора
этой оси, заключенного между ортогональными проекциями его начала и конца, взятая со знаком «+», если направление вектора  совпадает с направлением оси, и со знаком «–», если эти направления противоположны (рис. 8).
совпадает с направлением оси, и со знаком «–», если эти направления противоположны (рис. 8).
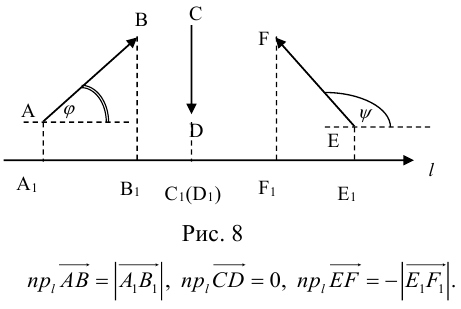
Определение: Углом между вектором и осью называется угол, на который нужно повернуть в положительном направлении ось до совпадения ее направления с направлением вектора (положительным считается поворот против часовой стрелки).


Очевидно, проекцию вектора на ось можно найти по формуле

Можно показать, что проекция линейной комбинации векторов равна та-
кой же линейной комбинации их проекций:

В частности, проекция суммы векторов равна сумме их проекций:
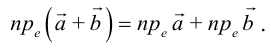
Рассмотрим прямоугольную декартову систему координат ХОY. Обозначим  – орт оси ОХ,
– орт оси ОХ,  – орт оси OY. Выберем точку A , и пусть x, y – проекции ее на ОХ и OY,то есть координаты этой точки (рис. 9).
– орт оси OY. Выберем точку A , и пусть x, y – проекции ее на ОХ и OY,то есть координаты этой точки (рис. 9).
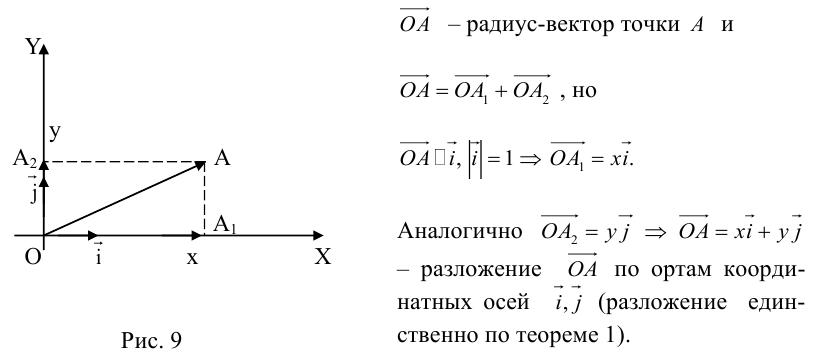
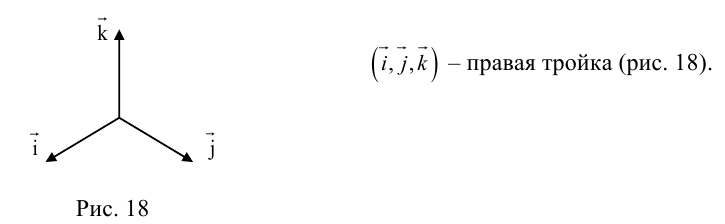
Аналогично в пространственной системе OXYZ  – орты координатных осей) (рис. 10):
– орты координатных осей) (рис. 10):

– разложение  по ортам координатных осей (единственно по теореме 2).
по ортам координатных осей (единственно по теореме 2).
Таким образом, если задана прямоугольная декартова система координат (пдск), то со всяким пространственным вектором  можно связать три числа x,y,z (или два числа x, y, если вектор плоский), которые являются коэффициентами разложения этого вектора по ортам координатных осей, а также являются проекциями этого вектора на координатные оси.
можно связать три числа x,y,z (или два числа x, y, если вектор плоский), которые являются коэффициентами разложения этого вектора по ортам координатных осей, а также являются проекциями этого вектора на координатные оси.
Определение: Координатами вектора  в любой пдск называются коэффициенты в разложении этого вектора по ортам координатных осей.
в любой пдск называются коэффициенты в разложении этого вектора по ортам координатных осей.
Таким образом, можно дать еще одно определение вектора.
Определение: Вектором называется упорядоченная тройка чисел (упорядоченная пара, если вектор плоский).
Пример №7
Если  и наоборот, если
и наоборот, если

Так как, с одной стороны, вектор – объект, имеющий длину и направление, а с другой, – упорядоченная тройка чисел, то, зная длину и направление, можно определить его координаты и наоборот. Направление вектора в заданной системе координат характеризуется его направляющими косинусами (рис. 11):
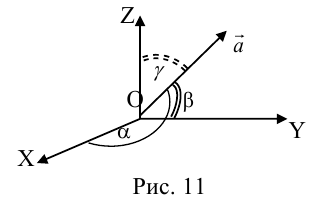
Из этих формул очевидно следует основное свойство направляющих косинусов:

Если известны длина  и направляющие косинусы вектора, то его координаты вычисляются по формулам:
и направляющие косинусы вектора, то его координаты вычисляются по формулам:

Пусть AB – произвольный вектор в системе OXYZ, OA,OB – радиус-векторы его начала и конца,

Тогда

 (см. свойства линейных операций над векторами). Таким образом,
(см. свойства линейных операций над векторами). Таким образом, , то есть для определения координат вектора надо из координат его конца вычесть координаты начала.
, то есть для определения координат вектора надо из координат его конца вычесть координаты начала.
Определение: Базисом в пространстве называется любая упорядоченная тройка некомпланарных векторов (рис. 13).
Если  – базис, то
– базис, то  – другой базис, так как изменился порядок следования векторов.
– другой базис, так как изменился порядок следования векторов.
Определение: Базис называется прямоугольным декартовым, если базисные векторы взаимно перпендикулярны и длина каждого равна 1.
Такой базис принято обозначать 
Из теоремы 2 следует, что всякий вектор  может быть разложен по базису
может быть разложен по базису  , то есть представлен в виде:
, то есть представлен в виде:  . Числа x,y,z называются координатами в базисе
. Числа x,y,z называются координатами в базисе  .
.
Определение: Базисом на плоскости называется любая упорядоченная пара неколлинеарных векторов.
Если  – базис, то представление вектора в виде
– базис, то представление вектора в виде  называется разложением
называется разложением  по базису
по базису и x, y – координаты
и x, y – координаты  в этом базисе.
в этом базисе.
Определение: Базисом на прямой называется любой ненулевой вектор этой прямой.
Деление отрезка в данном отношении
Рассмотрим задачу: дан отрезок AB . Найти точку D , которая делит AB в заданном отношении  (рис. 14).
(рис. 14).
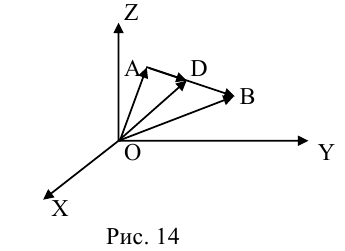
Введем прямоугольную декартову систему координат (пдск) OXYZ, тогда

Обозначим
Так как  (лежат на одной прямой) и
(лежат на одной прямой) и  то
то

Переходя от этого векторного равенства к равенству соответствующих координат, получим:

ЗАМЕЧАНИЕ 1. Если D – середина отрезка AB , то k 1, поэтому

ЗАМЕЧАНИЕ 2. Если k < 0,  , то точка D лежит за пределами AB : так как
, то точка D лежит за пределами AB : так как  , то при
, то при 
В этом случае 

Скалярное произведение векторов
Определение: Скалярным произведением векторов  называется скаляр (число), равный
называется скаляр (число), равный 
Скалярное произведение обозначается так:  или
или 

Так как  (рис. 16) или
(рис. 16) или  то
то
Свойства скалярного произведения
1. – очевидно из определения.
– очевидно из определения.
2.
Доказательство:

3.
Доказательство:
а)  – очевидно.
– очевидно.
б) 
в)  В этом случае
В этом случае
4.
Отсюда следует, что 
Необходимым и достаточным условием перпендикулярности векторов является равенство нулю их скалярного произведения:
5.
Доказательство:
а) пусть 
б) пусть 
В первом и втором случаях один из сомножителей – нулевой вектор. Его направление не определено, поэтому можно считать, что  . В третьем случае
. В третьем случае 
Используя свойства 4 и 5, составим таблицу вычисления скалярного произведения базисных векторов 
Пусть в некоторой пдск  . Найдем скалярное произведение этих векторов:
. Найдем скалярное произведение этих векторов:

Таким образом, 
Пример №8
Найти, при каком значении x векторы  перпендикулярны.
перпендикулярны.
Два вектора перпендикулярны тогда и только тогда, когда их скалярное произведение равно нулю (свойство 5), поэтому найдем скалярное произведение по формуле (2.5): 
Пример №9
Найти угол между биссектрисой AD и медианой  если
если 
Так как 
то 
Найдем координаты векторов  . Точка M – середина BC , поэтому по формулам (2.4)
. Точка M – середина BC , поэтому по формулам (2.4)
По теореме о биссектрисе внутреннего угла треугольника 
Чтобы найти k , вычислим длины AC и AB :
Разделим отрезок CB в данном отношении по формулам (2.3):

отсюда 
Заметим, что  . Это замечание позволит нам не иметь дело с дробями, так как
. Это замечание позволит нам не иметь дело с дробями, так как

Пример №10
Найти 
Воспользуемся свойствами 1–4 скалярного произведения:

Отсюда 
ЗАМЕЧАНИЕ. Так как работа силы  по перемещению материальной точки вдоль вектора
по перемещению материальной точки вдоль вектора  вычисляется по формуле
вычисляется по формуле 
Определение векторного произведения векторов
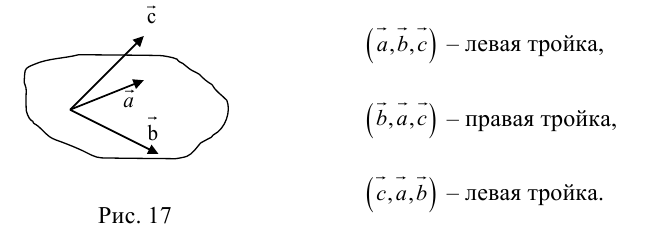
Определение: Тройка некомпланарных векторов  , имеющих общее начало, называется правой (левой), если
, имеющих общее начало, называется правой (левой), если  конца третьего вектора c вращение первого вектора
конца третьего вектора c вращение первого вектора  ко второму вектору
ко второму вектору  по кратчайшему пути наблюдается против (по) часовой стрелки (рис. 17).
по кратчайшему пути наблюдается против (по) часовой стрелки (рис. 17).
Определение: Векторным произведением вектора  на вектор
на вектор  называется вектор
называется вектор , удовлетворяющий условиям:
, удовлетворяющий условиям:
- ( перпендикулярен плоскости векторов и ).
- Направление таково, что тройка– правая.
-
 (
( – правая.
– правая.
Векторное произведение обозначается так: 
ЗАМЕЧАНИЕ 1. Геометрический смысл векторного произведения: длина векторного произведения численно равна площади параллелограмма, построенного на этих векторах.
Это следует из того, что площадь параллелограмма равна произведению длин смежных сторон на синус угла между ними.
Заметим, что

Таким образом, длину вектора векторного произведения можно вычислить с помощью скалярного произведения по формуле

Пример №11
Найти площадь параллелограмма, построенного на векторах

По формуле (2.7): 
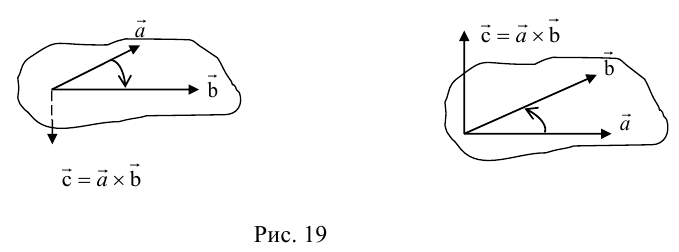
ЗАМЕЧАНИЕ 2. Направление вектора  можно также (кроме п.2) определить по правилу винта: направление вектора
можно также (кроме п.2) определить по правилу винта: направление вектора  совпадает с направлением поступательного движения винта в правой резьбой при вращении его в сторону поворота первого вектора
совпадает с направлением поступательного движения винта в правой резьбой при вращении его в сторону поворота первого вектора  ко второму вектору
ко второму вектору  по кратчайшему пути (рис. 19).
по кратчайшему пути (рис. 19).
Свойства векторного произведения
1.
Доказательство:
а)пусть  или
или  . В первом и втором случаях один из сомножителей – нулевой вектор.
. В первом и втором случаях один из сомножителей – нулевой вектор.
Его направление не определено, поэтому можно считать, что  . Если
. Если 
б)пусть 
2. 
Доказательство: По определению направления векторов  и
и  противоположны, а модули равны, значит, векторы отличаются лишь знаком.
противоположны, а модули равны, значит, векторы отличаются лишь знаком.
3. – свойство линейности векторного произведения по первому сомножителю (без доказательства).
– свойство линейности векторного произведения по первому сомножителю (без доказательства).
Векторное произведение также линейно и по второму сомножителю.
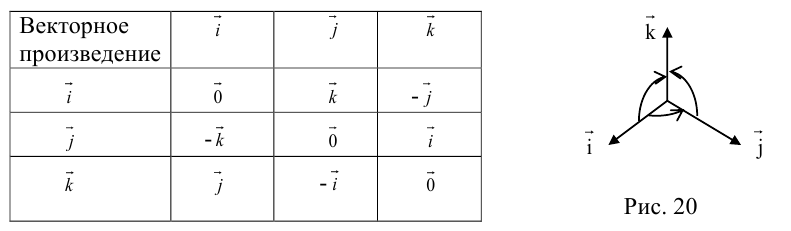
Используя определение и свойства 1 и 2, составим таблицу вычисления векторного произведения базисных векторов  : векторы, стоящие в левом столбце, умножаются на соответствующие векторы верхней строки (рис. 20).
: векторы, стоящие в левом столбце, умножаются на соответствующие векторы верхней строки (рис. 20).
Пусть в некоторой пдск  . Найдем векторное произведение этих векторов:
. Найдем векторное произведение этих векторов:
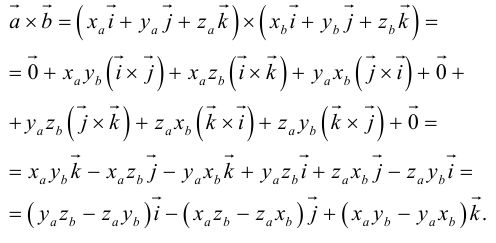
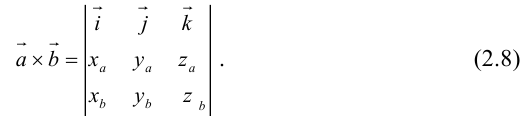
Заметим, что это выражение можно получить, вычислив символический определитель (сделать это можно по-разному, но лучше разложить по первой строке):

Таким образом,
Пример №12
Вычислить векторное произведение векторов 
По формуле (2.8): 
Заметим, что площадь треугольника, построенного на векторах  , можно вычислить двумя способами: как половину длины найденного вектора или используя формулу (2.7). Заметим, что
, можно вычислить двумя способами: как половину длины найденного вектора или используя формулу (2.7). Заметим, что 


или

Пример №13
Вычислить площадь параллелограмма, построенного на векторах 
Так как  , то вычислим векторное произведение, используя его свойства:
, то вычислим векторное произведение, используя его свойства:
Отсюда 
Определение смешанного произведения векторов
Определение: Смешанным произведением векторов  называется число
называется число  – скалярное произведение a на векторное произведение
– скалярное произведение a на векторное произведение 
Смешанное произведение обозначается так: 
Пусть в некоторой пдск 
Обозначим
Тогда
по 7 свойству определителей.
Таким образом,
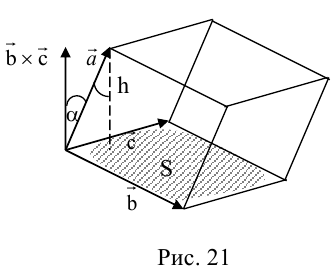
По определению скалярного произведения 
Совместим начала всех трех векторов в одной точке. Тогда (рис. 21)
 – площадь параллелограмма,
– площадь параллелограмма,
 – высота параллелепипеда,
– высота параллелепипеда,
 – объем параллелепипеда.
– объем параллелепипеда.
Геометрический смысл смешанного произведения: модуль смешанного произведения численно равен объему параллелепипеда, построенного на векторах-сомножителях, при этом  – правая тройка, и
– правая тройка, и  – левая тройка.
– левая тройка.
Свойства смешанного произведения
1. Необходимым и достаточным условием компланарности трех векторов является равенство нулю их смешанного произведения:  компланарны
компланарны
Доказательство: а)  компланарны
компланарны 
Если  компланарны, то на них нельзя построить параллелепипед, а потому
компланарны, то на них нельзя построить параллелепипед, а потому 
б) компланарны.
компланарны.
Во всех трех случаях  компланарны: в частности, если
компланарны: в частности, если  параллелен плоскости векторов
параллелен плоскости векторов  , что означает их компланарность.
, что означает их компланарность.
2. Круговая перестановка сомножителей в смешанном произведении не изменяет его величины. Перестановка соседних сомножителей изменяет его знак, не изменяя абсолютной величины:

Доказательство следует из формулы (2.9) и свойства 3 определителей, при этом круговая перестановка сомножителей соответствует двойной перемене строк в определителе, а потому оставляет его неизменным.
3. В смешанном произведении векторное и скалярное произведения можно менять местами: 
Доказательство: из свойства 2 смешанного произведения и свойства 1 скалярного получим: 
4. Смешанное произведение линейно по каждому из трех сомножителей.
 – линейность по первому сомножителю.
– линейность по первому сомножителю.
Доказательство следует из формулы (2.9) и свойств определителей.
Пример №14
Найти объем тетраэдра, построенного на векторах
 , и его высоту, перпендикулярную плоскости векторов
, и его высоту, перпендикулярную плоскости векторов  .
.
Объем тетраэдра в 6 раз меньше объема параллелепипеда, построенного на этих векторах, поэтому 

Отсюда  (заметим, что
(заметим, что  – левая тройка, так как смешанное произведение отрицательно).
– левая тройка, так как смешанное произведение отрицательно).
Чтобы найти высоту, воспользуемся формулой

По формуле (2.7) 
Лекции по предметам:
- Математика
- Алгебра
- Линейная алгебра
- Геометрия
- Аналитическая геометрия
- Высшая математика
- Дискретная математика
- Математический анализ
- Теория вероятностей
- Математическая статистика
- Математическая логика
Оглавление — Линейная алгебра
Ортогональный и ортонормированный базисы евклидова пространства
Так как евклидово пространство является линейным, на него переносятся все понятия и свойства, относящиеся к линейному пространству, в частности, понятия базиса и размерности.
Базис [math]mathbf{e}_1,mathbf{e}_2,ldots,mathbf{e}_n[/math] евклидова пространства называется ортогональным, если все образующие его векторы попарно ортогональны, т.е.
[math]langle mathbf{e}_i,mathbf{e}_jrangle=0[/math] при [math]ine j,~~ i=1,2,ldots,n,~~ j=1,2,ldots,n.[/math]
Базис [math]mathbf{e}_1,mathbf{e}_2,ldots,mathbf{e}_n[/math] евклидова пространства называется ортонормированным, если его векторы попарно ортогональны и длина каждого из них равна единице:
[math]langle mathbf{e}_i,mathbf{e}_jrangle= begin{cases}1,&i=j,\ 0,&ine j end{cases}i=1,2,ldots,n,~~ j=1,2,ldots,n.[/math]
(8.31)
Теорема 8.5. В конечномерном евклидовом пространстве любую систему ортогональных (ортонормированных) векторов можно дополнить до ортогонального (ортонормированного) базиса.
В самом деле, по теореме 8.2 любую систему линейно независимых векторов, в частности, ортогональную (ортонормированную), можно дополнить до базиса. Применяя к этому базису процесс ортогонализации, получаем ортогональный базис. Нормируя векторы этого базиса (см. пункт 4 замечаний 8.11), получаем ортонормированный базис.
Выражение скалярного произведения через координаты сомножителей
Пусть [math]mathbf{e}_1,mathbf{e}_2,ldots,mathbf{e}_n[/math] — базис евклидова пространства, в котором векторы [math]mathbf{x}[/math] и [math]mathbf{y}[/math] имеют координаты [math]x_1,x_2,ldots,x_n[/math] и [math]y_1,y_2,ldots,y_n[/math] соответственно, т.е.
[math]mathbf{x}= x_1 mathbf{e}_1+x_2 mathbf{e}_2+ldots+ x_n mathbf{e}_n,qquad mathbf{y}= y_1 mathbf{e}_1+y_2 mathbf{e}_2+ldots+ y_n mathbf{e}_n.[/math]
Выразим скалярное произведение, используя следствие 3 из аксиом скалярного произведения:
[math]langle mathbf{x},mathbf{y}rangle= langle x_1 mathbf{e}_1+x_2 mathbf{e}_2+ldots+ x_n mathbf{e}_n,, y_1 mathbf{e}_1+y_2 mathbf{e}_2+ldots+ y_n mathbf{e}_n rangle= sum_{i=1}^{n}sum_{i=1}^{n}x_iy_jlangle mathbf{e}_i,mathbf{e}_jrangle.[/math]
Преобразуем это выражение, используя операции с матрицами:
[math]langle mathbf{x},mathbf{y}rangle= x^Tcdot G(mathbf{e}_1,mathbf{e}_2,ldots, mathbf{e}_n)cdot y,[/math]
(8.32)
где [math]x=begin{pmatrix}x_1&cdots x_nend{pmatrix}^T,~ y=begin{pmatrix} y_1&cdots& y_n end{pmatrix}^T[/math] — координатные столбцы векторов [math]mathbf{x}[/math] и [math]mathbf{y}[/math], a [math]G(mathbf{e}_1,mathbf{e}_2,ldots, mathbf{e}_n)[/math] — квадратная симметрическая матрица, составленная из скалярных произведений
[math]G(mathbf{e}_1,mathbf{e}_2,ldots, mathbf{e}_n)= begin{pmatrix} langle mathbf{e}_1,mathbf{e}_1rangle& langle mathbf{e}_1,mathbf{e}_2rangle &cdots&langle mathbf{e}_1, mathbf{e}_nrangle\ langle mathbf{e}_2,mathbf{e}_1rangle& langle mathbf{e}_2, mathbf{e}_2rangle &cdots&langle mathbf{e}_2,mathbf{e}_nrangle\ vdots&vdots&ddots&vdots\ langle mathbf{e}_n,mathbf{e}_1rangle& langle mathbf{e}_n,mathbf{e}_2rangle &cdots&langle mathbf{e}_n,mathbf{e}_nrangle end{pmatrix}!.[/math]
(8.33)
которая называется матрицей Грама системы векторов [math]mathbf{e}_1,mathbf{e}_2,ldots,mathbf{e}_n[/math].
Преимущества ортонормированного базиса
Для ортонормированного базиса [math]mathbf{e}_1,mathbf{e}_2,ldots,mathbf{e}_n[/math] формула (8.32) упрощается, так как из условия (8.31) следует, что матрица Грама [math]G(mathbf{e}_1, mathbf{e}_2,ldots,mathbf{e}_n)[/math] ортонормированной системы [math]mathbf{e}_1, mathbf{e}_2,ldots, mathbf{e}_n[/math] равна единичной матрице: [math]G(mathbf{e}_1, mathbf{e}_2,ldots,mathbf{e}_n)=E[/math].
1. В ортонормированном базисе [math]mathbf{e}_1,mathbf{e}_2,ldots, mathbf{e}_n[/math] скалярное произведение векторов [math]mathbf{x}[/math] и [math]mathbf{y}[/math] находится по формуле: [math]langle mathbf{x},mathbf{y}rangle= x_1y_1+x_2y_2+ldots+x_ny_n[/math], где [math]x_1,ldots,x_n[/math] — координаты вектора [math]mathbf{x}[/math], а [math]y_1,ldots,y_n[/math] — координаты вектора [math]mathbf{y}[/math].
2. В ортонормированном базисе [math]mathbf{e}_1,mathbf{e}_2,ldots, mathbf{e}_n[/math] длина вектора [math]mathbf{x}[/math] вычисляется по формуле [math]|mathbf{x}|= sqrt{x_1^2+x_2^2+ldots+x_n^2}[/math], где [math]x_1,ldots,x_n[/math] — координаты вектора [math]mathbf{x}[/math].
3. Координаты [math]x_1,ldots,x_n[/math] вектора [math]mathbf{x}[/math] относительно ортонормированного базиса [math]mathbf{e}_1,mathbf{e}_2,ldots,mathbf{e}_n[/math] находятся при помощи скалярного произведения по формулам: [math]x_1=langle mathbf{x},mathbf{e}_1rangle,ldots, x_n=langle mathbf{x},mathbf{e}_nrangle[/math].
В самом деле, умножая обе части равенства [math]mathbf{x}= x_1 mathbf{e}_1+ldots+x_n mathbf{e}_n[/math] на [math]mathbf{e}_1[/math], получаем
[math]langle mathbf{x},mathbf{e}_1rangle= x_1underbrace{langlemathbf{e}_1, mathbf{e}_1 rangle}_{1}+ x_2underbrace{langle mathbf{e}_1,mathbf{e}_2 rangle}_{0}+ldots+ x_nunderbrace{langle mathbf{e}_n, mathbf{e}_n rangle}_{0}quad Leftrightarrowquad x_1=langle mathbf{x},mathbf{e}_1rangle.[/math]
Аналогично доказываются остальные формулы.
Изменение матрицы Грама при переходе от одного базиса к другому
Пусть [math](mathbf{e})=(mathbf{e}_1,ldots,mathbf{e}_n)[/math] и [math](mathbf{f})= (mathbf{f}_1,ldots,mathbf{f}_n)[/math] — два базиса евклидова пространства [math]mathbb{E}[/math], a [math]S[/math] — матрица перехода от базиса [math](mathbf{e})[/math] к базису [math](mathbf{f})colon, (mathbf{f})=(mathbf{e})S[/math]. Требуется найти связь матриц Грама систем векторов [math](mathbf{e})[/math] и [math](mathbf{f})[/math]
По формуле (8.32) вычислим скалярное произведение векторов [math]mathbf{x}[/math] и [math]mathbf{y}[/math] в разных базисах:
[math]langle mathbf{x},mathbf{y}rangle= {mathop{x}limits_{(mathbf{e})}}^Tcdot, G(mathbf{e}_1,ldots,mathbf{e}_n)cdot mathop{mathbf{y}}limits_{(mathbf{e})}= {mathop{x}limits_{(mathbf{f})}}^Tcdot, G(mathbf{f}_1,ldots,mathbf{f}_n)cdot mathop{mathbf{y}}limits_{(mathbf{f})},[/math]
где [math]mathop{x}limits_{(mathbf{e})},, mathop{x}limits_{(mathbf{f})}[/math] и [math]mathop{y}limits_{(mathbf{e})},, mathop{y}limits_{(mathbf{f})}[/math] — координатные столбцы векторов [math]mathbf{x}[/math] и [math]mathbf{y}[/math] в соответствующих базисах. Подставляя в последнее равенство связи [math]mathop{x}limits_{(mathbf{e})}= S mathop{x}limits_{(mathbf{f})},[/math] [math]mathop{y}limits_{(mathbf{e})}= S mathop{y}limits_{(mathbf{f})}[/math], получаем тождество
[math]{mathop{x}limits_{(mathbf{f})}}^Tcdot S^Tcdot, G(mathbf{e}_1,ldots,mathbf{e}_n)cdot Scdot mathop{mathbf{y}}limits_{(mathbf{f})}= {mathop{x}limits_{(mathbf{f})}}^Tcdot, G(mathbf{f}_1,ldots,mathbf{f}_n)cdot mathop{mathbf{y}}limits_{(mathbf{f})}.[/math]
Отсюда следует формула изменения матрицы Грама при переходе от одного базиса к другому:
[math]G(mathbf{f}_1,ldots,mathbf{f}_n)= S^Tcdot G(mathbf{e}_1,ldots,mathbf{e}_n)cdot S.[/math]
Записав это равенство для ортонормированных базисов [math](mathbf{e})[/math] и [math](mathbf{f})[/math], получаем [math]E=S^TES[/math], так как матрицы Грама ортонормированных базисов единичные: [math]G(mathbf{e}_1,ldots,mathbf{e}_n)= G(mathbf{f}_1,ldots,mathbf{f}_n)=E[/math]. Поэтому матрица [math]S[/math] перехода от одного ортонормированного базиса к другому является ортогональной: [math]S^{-1}=S^T[/math].
Свойства определителя Грама
Определитель матрицы (8.33) называется определителем Грама. Рассмотрим свойства этого определителя.
1. Критерий Грама линейной зависимости векторов: система векторов [math]mathbf{v}_1,mathbf{v}_2, ldots, mathbf{v}_k[/math] линейно зависима тогда и только тогда, когда определитель Грама этой системы равен нулю.
Действительно, если система [math]mathbf{v}_1, mathbf{v}_2, ldots,mathbf{v}_k[/math] линейно зависима, то существуют такие числа [math]x_1,x_2,ldots,x_k[/math], не равные нулю одновременно, что
[math]x_1cdot mathbf{v}_1+x_2cdot mathbf{v}_2+ldots+ x_kcdot mathbf{v}_k= mathbf{o}.[/math]
Умножая это равенство скалярно на [math]mathbf{v}_1[/math], затем на [math]mathbf{v}_2[/math] и т.д. на [math]mathbf{v}_k[/math], получаем однородную систему уравнений [math]G(mathbf{v}_1,mathbf{v}_2,ldots,mathbf{v}_k)x=o[/math], которая имеет нетривиальное решение [math]x=begin{pmatrix}x_1&cdots&x_k end{pmatrix}^T[/math]. Следовательно, ее определитель равен нулю. Необходимость доказана. Достаточность доказывается, проводя рассуждения в обратном порядке.
Следствие. Если какой-либо главный минор матрицы Грама равен нулю, то и определитель Грама равен нулю.
Главный минор матрицы Грама системы [math]mathbf{v}_1, mathbf{v}_2,ldots,mathbf{v}_k[/math] представляет собой определитель Грама подсистемы векторов. Если подсистема линейно зависима, то и вся система линейно зависима.
2. Определитель Грама [math]det{G (mathbf{v}_1,mathbf{v}_2, ldots, mathbf{v}_k)}[/math] не изменяется в процессе ортогонализации системы векторов [math]mathbf{v}_1,mathbf{v}_2,ldots,mathbf{v}_k[/math]. Другими словами, если в процессе ортогонализации векторов [math]mathbf{v}_1,mathbf{v}_2,ldots,mathbf{v}_k[/math] получены векторы [math]mathbf{w}_1,mathbf{w}_2,ldots,mathbf{w}_k[/math], то
[math]det G(mathbf{v}_1,mathbf{v}_2,ldots,mathbf{v}_k)= det G(mathbf{w}_1, mathbf{w}_2, ldots,mathbf{w}_k)= langle mathbf{w}_1,mathbf{w}_1ranglecdot langle mathbf{w}_2,mathbf{w}_2ranglecdot ldotscdot langle mathbf{w}_k,mathbf{w}_krangle.[/math]
Действительно, в процессе ортогонализации по векторам [math]mathbf{v}_1,mathbf{v}_2, ldots,mathbf{v}_k[/math] последовательно строятся векторы
[math]mathbf{w}_1=mathbf{v}_1,quad mathbf{w}_2= mathbf{v}_2- alpha_{21} mathbf{w}_1,quad ldots,quad mathbf{w}_k= mathbf{v}_k- sum_{j=1}^{k-1}alpha_{kj} mathbf{w}_j.[/math]
После первого шага определитель Грама не изменяется
[math]det G(mathbf{v}_1,mathbf{v}_2,ldots,mathbf{v}_k)= det G(mathbf{w}_1, mathbf{v}_2, ldots,mathbf{v}_k).[/math]
Выполним с определителем [math]det G(mathbf{w}_1, mathbf{v}_2, ldots,mathbf{v}_k)[/math] следующие преобразования. Прибавим ко второй строке первую, умноженную на число [math](-alpha_{21})[/math], а затем ко второму столбцу прибавим первый, умноженный на [math](-alpha_{21})[/math]. Получим определитель
[math]det G(mathbf{w}_1,mathbf{v}_2-alpha_{21}mathbf{w}_1,ldots,mathbf{v}_k)= det G(mathbf{w}_1,mathbf{w}_2, mathbf{v}_3, ldots,mathbf{v}_k).[/math]
Так как при этих преобразованиях определитель не изменяется, то
[math]det G(mathbf{v}_1,mathbf{v}_2,ldots,mathbf{v}_k)= det G(mathbf{w}_1, mathbf{v}_2,ldots,mathbf{v}_k)= det G(mathbf{w}_1, mathbf{w}_2,mathbf{v}_3, ldots,mathbf{v}_k).[/math]
Значит, после второго шага в процессе ортогонализации определитель не изменяется. Продолжая аналогично, получаем после [math]k[/math] шагов:
[math]det G(mathbf{v}_1,mathbf{v}_2,ldots,mathbf{v}_k)= det G(mathbf{w}_1, mathbf{w}_2, ldots,mathbf{w}_k).[/math]
Вычислим правую часть этого равенства. Матрица [math]G(mathbf{w}_1,mathbf{w}_2,ldots, mathbf{w}_k)[/math] Грама ортогональной системы [math]mathbf{v}_1,mathbf{v}_2, ldots,mathbf{v}_k[/math] векторов является диагональной, так как [math]langle mathbf{w}_i,mathbf{w}_jrangle=0[/math] при [math]ine j[/math]. Поэтому ее определитель равен произведению элементов, стоящих на главной диагонали:
[math]det G(mathbf{w}_1,mathbf{w}_2,ldots,mathbf{w}_k)= langle mathbf{w}_1, mathbf{w}_1ranglecdot langle mathbf{w}_2,mathbf{w}_2ranglecdot ldots langle mathbf{w}_k, mathbf{w}_krangle.[/math]
3. Определитель Грама любой системы [math]mathbf{v}_1,mathbf{v}_2,ldots, mathbf{v}_k[/math] векторов удовлетворяет двойному неравенству
[math]0leqslant det G(mathbf{v}_1,mathbf{v}_2,ldots,mathbf{v}_k) leqslant langle mathbf{v}_1, mathbf{v}_1ranglecdot langle mathbf{v}_2,mathbf{v}_2ranglecdot ldots langle mathbf{v}_k, mathbf{v}_krangle.[/math]
Докажем неотрицательность определителя Грама. Если система [math]mathbf{v}_1,mathbf{v}_2, ldots, mathbf{v}_k[/math] линейно зависима, то определитель равен нулю (по свойству 1). Если же система [math]mathbf{v}_1,mathbf{v}_2,ldots, mathbf{v}_k[/math] линейно независима, то, выполнив процесс ортогонализации, получим ненулевые векторы [math]mathbf{w}_1,mathbf{w}_2, ldots, mathbf{w}_k[/math], для которых по свойству 2:
[math]det G(mathbf{v}_1,mathbf{v}_2,ldots, mathbf{v}_k)= det G(mathbf{w}_1, mathbf{w}_2, ldots, mathbf{w}_k)= |mathbf{w}_1|^2cdot |mathbf{w}_2|^2cdot ldotscdot |mathbf{w}_k|^2>0.[/math]
Оценим теперь скалярный квадрат [math]langle mathbf{v}_j,mathbf{w}_jrangle[/math]. Выполняя процесс ортого-1нализации, имеем [math]mathbf{v}_j= mathbf{w}_j+ alpha_{j,1}mathbf{w}_1+ ldots+ alpha_{j,j-1}mathbf{w}_{j-1}[/math]. Отсюда
[math]langle mathbf{v}_j,mathbf{w}_jrangle= langle mathbf{w}_j,mathbf{w}_jrangle+ sum_{i=1}^{j-1}alpha_{i,i}^2 langle mathbf{w}_j,mathbf{w}_jrangle geqslant langle mathbf{w}_j, mathbf{w}_jrangle.[/math]
Следовательно, по свойству 2 имеем
[math]langle mathbf{v}_1,mathbf{v}_1ranglecdot langle mathbf{v}_2,mathbf{v}_2 ranglecdot ldotscdot langle mathbf{v}_k,mathbf{v}_kranglegeqslant langle mathbf{w}_1, mathbf{w}_1ranglecdot langle mathbf{w}_2,mathbf{w}_2ranglecdot ldotscdot langle mathbf{w}_k, mathbf{w}_krangle= det G(mathbf{w}_1,mathbf{w}_2,ldots,mathbf{w}_k).[/math]
Замечания 8.12
1. Матрица Грама любой системы векторов является неотрицательно определенной, так как все ее главные миноры также являются определителями Грама соответствующих подсистем векторов и неотрицательны в силу свойства 3.
2. Матрица Грама любой линейно независимой системы векторов является положительно определенной, так как все ее угловые миноры положительны (в силу свойств 1,3), поскольку являются определителями Грама линейно независимых подсистем векторов.
3. Определитель квадратной матрицы [math]A[/math] (n-го порядка) удовлетворяет неравенству Адамара:
[math](det{A})^2leqslant prod_{i=1}^{n}Bigl(a_{i,1}^2+ a_{i,2}^2+ldots+ a_{i,n}^2Bigr).[/math]
Действительно, обозначив [math]a_1,a_2,ldots,a_n[/math] столбцы матрицы [math]A[/math], элементы матрицы [math]A^TA[/math] можно представить как скалярные произведения (8.27): [math]langle a_i,a_jrangle= (a_i)^Ta_j[/math]. Тогда [math]A^TA=G(a_1,a_2,ldots,a_n)[/math] — матрица Грама системы [math]a_1,a_2,ldots,a_n[/math] векторов пространства [math]mathbb{R}^n[/math]. По свойству 3, теореме 2.2 и свойству 1 определителя получаем доказываемое неравенство:
[math]begin{aligned} (det{A})^2&= det{A}cdotdet{A}= det{A^T}cdotdet{A}= det(A^TA)= det G(a_1,a_2,ldots,a_n)leqslant\[2pt] &leqslant |a_1|^2cdot |a_2|^2cdot ldotscdot |a_n|^2= prod_{i=1}^{n}Bigl(a_{i,1}^2+ a_{i,2}^2+ldots+ a_{i,n}^2Bigr). end{aligned}[/math]
4. Если [math]A[/math] — невырожденная квадратная матрица, то любой главный минор матрицы [math]A^TA[/math] положителен. Это следует из пункта 2, учитывая представление произведения [math]A^TA=G(a_1,ldots,a_n)[/math] как матрицы Грама системы линейно независимых векторов [math]a_1,ldots,a_n[/math] — столбцов матрицы [math]A[/math] (см. пункт 3).
Изоморфизм евклидовых пространств
Два евклидовых пространства [math]mathbb{E}[/math] и [math]mathbb{E}'[/math] называются изоморфными [math](mathbb{E}leftrightarrow mathbb{E}’)[/math], если они изоморфны как линейные пространства и скалярные произведения соответствующих векторов равны:
[math]left.{begin{matrix}mathbf{u}leftrightarrow mathbf{u}’\ mathbf{v}leftrightarrow mathbf{v}’end{matrix}}right}quad Rightarrowquad langle mathbf{u},mathbf{v}rangle= langle mathbf{u}’,mathbf{v}’rangle’.[/math]
‘
где [math](cdot,cdot)[/math] и [math](cdot,cdot)'[/math] — скалярные произведения в пространствах [math]mathbb{E}[/math] и [math]mathbb{E}'[/math] соответственно.
Напомним, что для изоморфизма конечномерных линейных пространств необходимо и достаточно, чтобы их размерности совпадали (см. теорему 8.3). Покажем, что это условие достаточно для изоморфизма евклидовых пространств (необходимость следует из определения). Как и при доказательстве теоремы 8.3, установим изоморфизм n-мерного евклидова пространства [math]mathbb{E}[/math] с вещественным арифметическим пространством [math]mathbb{R}^n[/math] со скалярным произведением (8.27). В самом деле, взяв в пространстве [math]mathbb{E}[/math] какой-нибудь ортонормированный базис [math](mathbf{e})=(mathbf{e}_1,ldots,mathbf{e}_n)[/math], поставим в соответствие каждому вектору [math]mathbf{x}in mathbb{E}[/math] его координатный столбец [math]xin mathbb{R}^n~ (mathbf{x}leftrightarrow x)[/math]. Это взаимно однозначное соответствие устанавливает изоморфизм линейных пространств: [math]mathbb{E}leftrightarrow mathbb{R}^n[/math]. В ортонормированном базисе скалярное произведение векторов [math]mathbf{x}[/math] и [math]mathbf{y}[/math] пространства [math]mathbb{E}[/math] находится по формуле
[math]langle mathbf{x},mathbf{y}rangle= x_1cdot y_1+x_2cdot y_2+ldots+x_ncdot y_n[/math]
(см. пункт 1 преимуществ ортонормированного базиса). Такое же выражение дает скалярное произведение (8.27) координатных столбцов [math]x[/math] и [math]y[/math], т.е. скалярные произведения соответствующих элементов равны
[math]langle mathbf{x},mathbf{y}rangle= x_1cdot y_1+x_2cdot y_2+ldots+x_ncdot y_n=x^Tcdot y.[/math]
Следовательно, евклидовы пространства [math]mathbb{E}[/math] и [math]mathbb{R}^n[/math] изоморфны.
Таким образом, изучение конечномерных евклидовых пространств может быть сведено к исследованию вещественного арифметического пространства [math]mathbb{R}^n[/math] со стандартным скалярным произведением (8.27).
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.